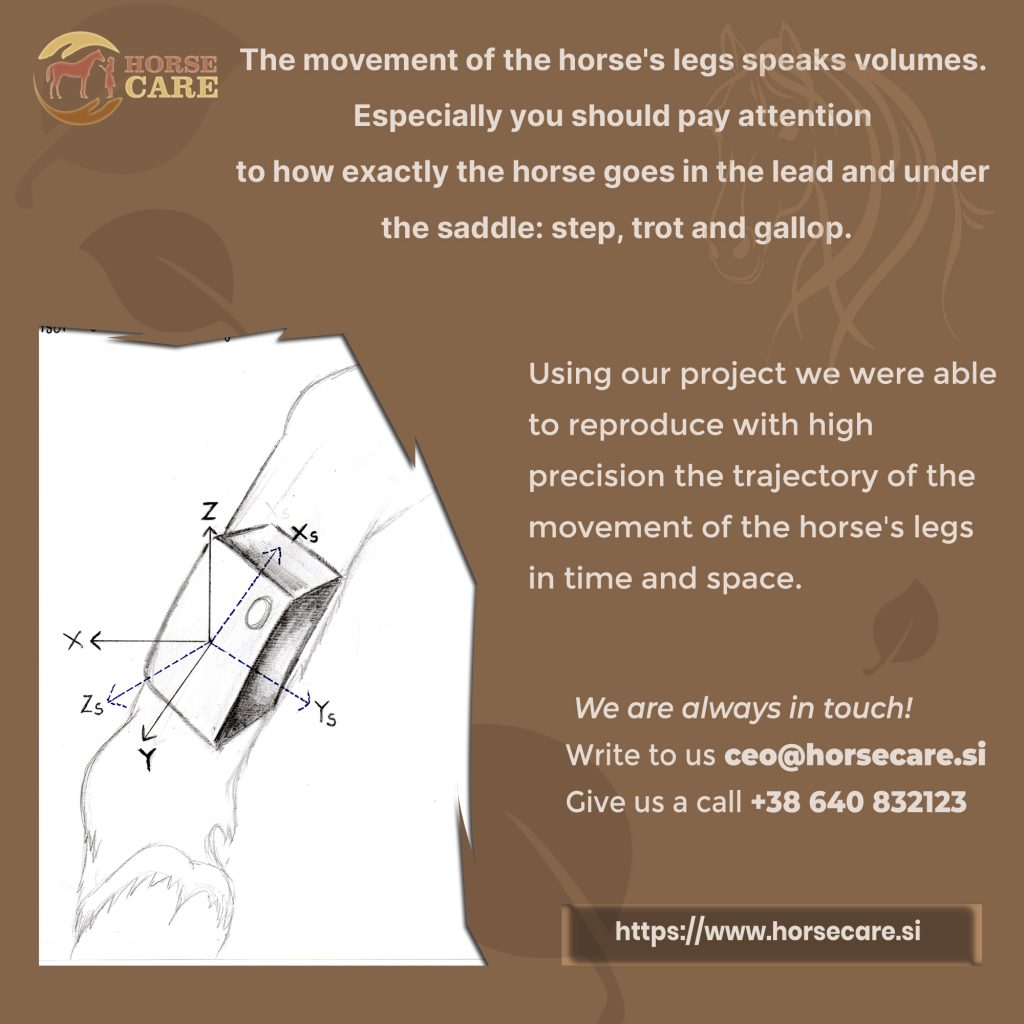
Using our project we were able to reproduce with high precision the trajectory of the movement of the horse’s legs in time and space.
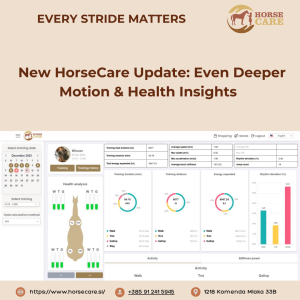
Using a mathematical apparatus, which is usually used for high-precision control of drones, allowed us to obtain normalized graphs of horse limb motion. The graph shows acceleration and absolute speed.
An example of a comparison of horse motion and the performance of our equipment is shown in the video.